Inspired by research that first introduced him to AI for public good, alumnus Andrew Wang has gone on to co-found a start-up developing open-source foundation models for image reconstruction.
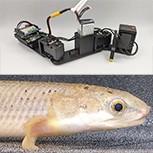
Researchers have developed a fish-like robot that shows how some species of modern fish are able to walk on land, and could help unravel how early vertebrates evolved similar abilities.
A Cambridge student and spinning top hobbyist used physics and precision engineering to design a ‘next-level’ fidget spinner and set a new Guinness World Record for the longest ever spin.
Schoolchildren were ‘bowled over’ to learn the connection between mathematics and cricket recently when they were invited to build small-scale replicas of a historic cricket bowling machine.
Sakthy Selvakumaran has been awarded a Fellowship of the Institution of Civil Engineers, honouring senior-level professionals who have made a significant impact on the industry and society.
From non-invasive glucose monitoring to rapid food and materials analysis, a new class of optical spectrometer could transform how and where high-precision measurements are made.